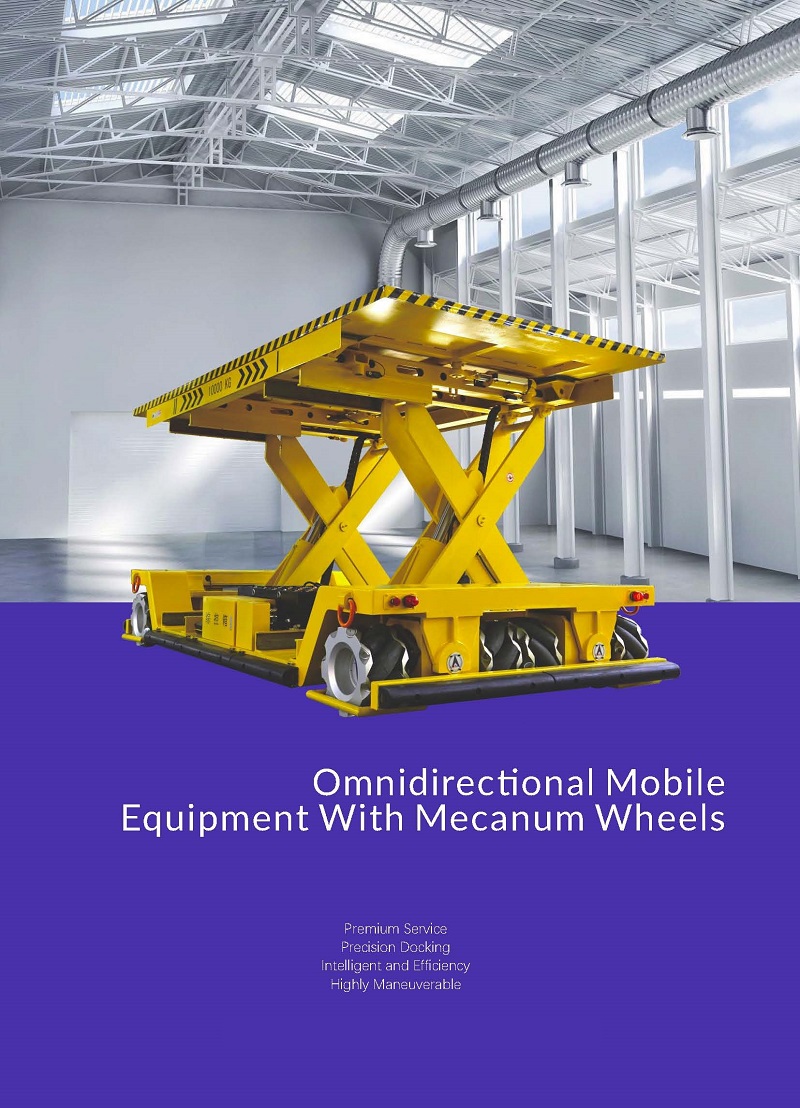
Omnidirectional Mobile Equipment with Mecanum Wheels is based on the specially structured Mecanum wheels as well as the velocity vector synthesis technology. By precisely controlling the rotary speed and direction for various wheels, the mobile platform could realize movement in any directions and turnings, without the steering system on conventional vehicles. Such characteristics bring it huge strength when
compared with conventional transport systems. When operating on narrow sites, it has zero turning radius and travels freely; when docking is needed, it could move omni-directionally thus increases efficiency; when working under high precision demands, it could make slight and precise adjustment to its position.


 Search
Search 
 Current position >
Current position >